Moteur pas à pas
Moteur pas à pas
![]()
![]()
|
|
|
Moteur Hybride 200 pas 1. IntroductionLes moteurs pas à pas permettent de réaliser un positionnement précis à partir d’une commande simple et peu coûteuse. Leur champ d’application est très vaste ( montre à aiguille à quartz, lecteur de disquette...) et touche beaucoup de domaines pour les entraînements à faible puissance. Contrairement à l’ensemble des autres moteurs, le comportement du moteur pas à pas est de type numérique: c’est à dire qu’il fonctionne par impulsions tout ou rien. La plupart des actionneurs, qu’ils soient électriques ou hydrauliques fournissent un couple ou une vitesse qui est fonction du niveau d’entrée de leur système de commande. Avec le moteur pas à pas, il suffit d’envoyer une impulsion pour le faire tourner d’un pas. Si ces impulsions sont envoyées à fréquence fixe le moteur tourne à vitesse constante. Chaque impulsion envoyée par le système de commande au module de puissance se traduit par la rotation d'un pas du moteur. La résolution angulaire¸ d'un moteur pas à pas va de 4 à 400 pas.
Il existe trois types de moteur pas à pas :
2. Le moteur pas à pas à aimant permanentIl est composé de deux parties : Le rotor qui est la partie mobile, il comporte un nombre pair de pôles à aimant permanent magnétisé dans le sens radial.
Le stator qui est la partie fixe, composé d'encoches comportant 2, 3, 4 enroulements électriques. Le moteur est dit unipolaire lorsqu’un enroulement crée toujours un pôle de même nom, il est dit bipolaire lorsqu’un enroulement crée soit un pôle nord soit un pôle sud selon le sens du courant.
3. Les moteurs pas à pas à réluctance variableLe rotor est non magnétisé. Le principe de réluctance variable repose sur l’énoncé suivant : « Dans un circuit magnétique le flux cherche à être maximal en empruntant le circuit de moindre réluctance, comme le courant dans un circuit électrique privilégie le circuit le moins résistant » Le rotor se positionne donc de façon à avoir une réluctance minimale, c’est à dire de façon à avoir la distance la plus faible entre les pôles du rotor et du stator.
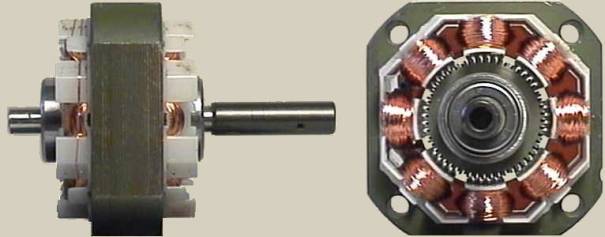
4. Le moteur pas à pas hybrideC'est une combinaison du moteur à aimant permanent et à réluctance variable. Le rotor est cylindrique magnétisé dans le sens axial à structures dentées (décalées les unes par rapport aux autres) 5. Comparaison des différents types
6. Modes d'excitation des phases pour un moteur pas à pas bipolaire Il existe trois types d’excitation:
6.1. Excitation pleine onde pas entier (une phase excitée)
Remarque : Les courants dans les phases sont bidirectionnels, cela nécessite donc un circuit capable d'inverser le sens du courant dans un enroulement (L298)
6.2. Excitation normale pas entier (deux phases excitées)Remarque : Dans ce mode de fonctionnement le couple est deux fois plus important.
6.3. Excitation en demi-pas (une phase excitée, puis deux)
Remarque : Le couple est irrégulier dans ce mode de fonctionnement.
6.4. Changement de sensPour changer le sens de rotation du rotor il faut inverser l'ordre d'excitation des phases. 6.5. Commande des moteurs pas à pas
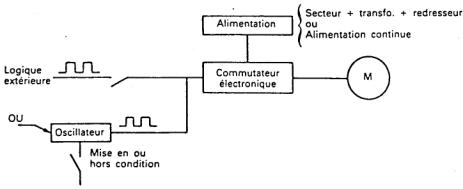
La commande de ces moteurs est souvent confiée à deux circuits spécialisés intégrants pour l'un la partie séquentielle( L297 ) et pour l'autre la partie puissance ( L298 ), parfois un seul et même circuit intègre les deux fonctions et suffit à piloter le moteur. Deux signaux sont nécessaires, un pour le sens (0 = sens horaire, 1= sens anti-horaire), l'autre étant un signal d'horloge synchrone sur fronts montants ou descendants suivant les circuits.
6.6. Caractéristiques |