16F84 : piloter de 1 à 8 servomoteurs, couple constant, vitesse maxi
16F84 : piloter de 1 à 8 servomoteurs, couple constant, vitesse maxi
![]()
![]()
|
|
|
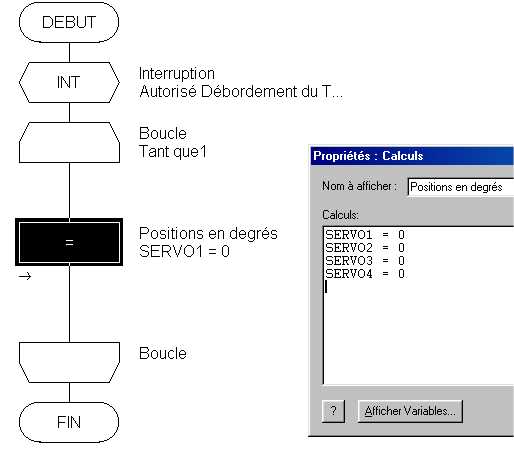
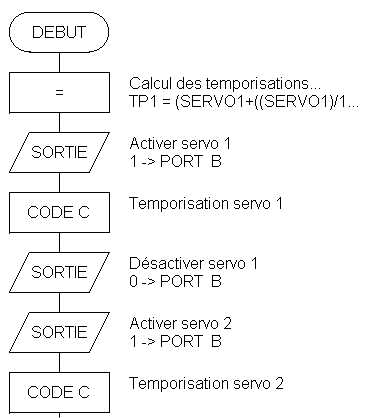
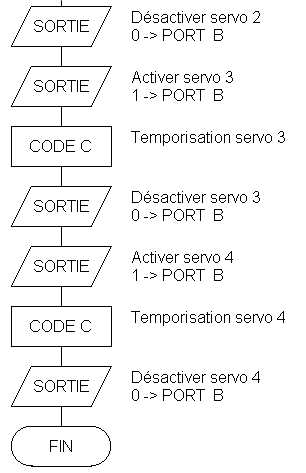
Composant logiciel réutilisable Flowcode à télécharger : servomoteur1.fcf Le composant est donné pour 4 servomoteurs câblés sur les sorties 0 à 3 du port B. Il faut un PIC 16F84 avec un quartz de 3,2768 MHz. Dans Flowcode, menu « Exécuter », « Vitesse d’horloge », paramétrer 3276800 Hz. Le programme principal contient une interruption du timer0 toutes les 20 ms (50 Hz). Les angles des servomoteurs sont donnés en degrés dans le programme principal dans les variables SERVO1, SERVO2… Pour modifier l’affectation des sorties ou le nombre de servomoteurs à piloter, menu « Macro », « Edition/Suppression », « Interrupt tmr0 » puis « Editer
|